中国农大新闻网讯 【编者按】今天,人工智能已经成为触手可及的生产力,农业这一古老领域正经历“智慧觉醒”,中国农业大学也正在以“智”为犁,以“数”为壤,带领农业高等教育进行一场深刻的“数智创新”。田间地头,深度学习算法解码土壤与气象密码,具身机器人化身“新农人”精准作业;实验室里,AI加速基因编辑与育种突破,合成数据技术破解农业科研瓶颈;课堂内外,智能体辅助个性化教学,跨学科培养“AI+”的复合人才……
智耕未来,“AI”在农大。本专栏将为您解锁中国农大人工智能创新密码,见证这场静默却壮阔的人工智能变革。
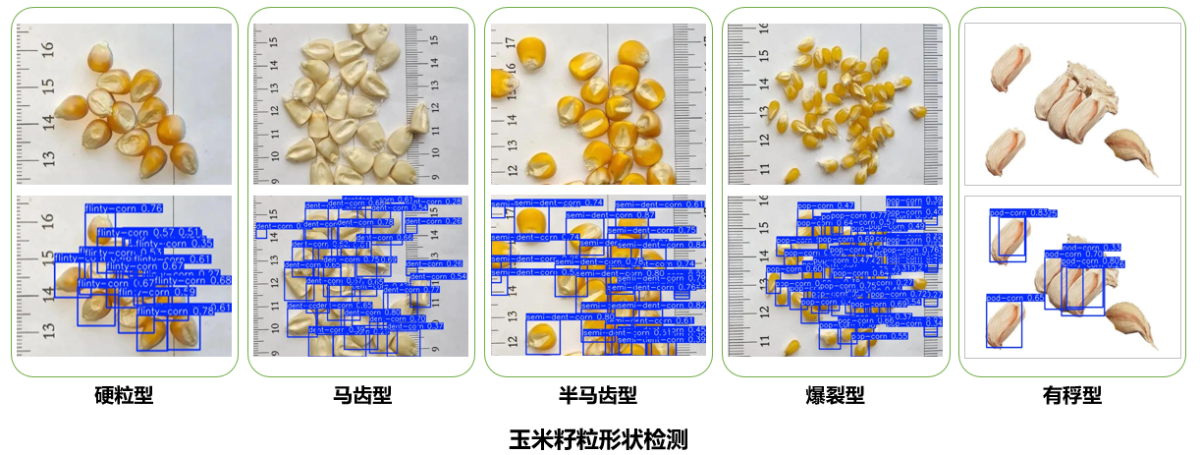
年初,DeepSeek火爆全网,自动驾驶、音乐创作、AI动画……人工智能包围着我们的生活。但是,当人工智能遇上农业,它如鹰鹘般火眼金睛、如蝗虫般避障敏锐;穿行田间,大到作物抗倒抗逆表型,小到植株果穗数、籽粒形状精确统计,全部轻松拿捏;既能自主学习,又可未雨绸缪,这样宝藏的人工智能你见过吗?
今天,就和我们一起走近工学院陈建教授与他的具身智能机器人,看看当AI遇上农业,会擦出怎样的火花?
具身智能机器人:走进田间地头 也走进人间烟火
“具身智能机器人,顾名思义首先要具有物理身体。其次,按照‘感知-决策-执行’的层次,通过‘可交互感知’‘会学习决策’‘自成长控制’三个核心智能行为,最终实现多个甚至成百上千个机器人协同作业”,陈建介绍到,具有“集体主义”精神团结地完成一件事,是具身智能机器人的一个显著特点。
“我国在具身智能机器人方面的研究和产业水平处于世界引领水平,近十年取得了长足发展和飞跃式进步”,陈建表示,具身智能机器人的大面积使用是新一次解放生产力的过程,它们会走进田间地头、走进家庭、走进工厂,与人类携手工作,或服务于人类所需,带来的不仅仅是满足于各种产业需求,更可以促进整个社会效率提升。

相较于传统机器人,具身智能机器不仅在执行层面模拟人类行为,而且在“感知-决策-执行”三个层次实现了整体的智能提升。“在感知层面,具身智能机器人更强调从传感器获得信息自主认知的能力,如无人驾驶汽车通过摄像头所感知到图像认识交通标识、车辆、行人、建筑物等概念;在决策和执行层面,目前,中国农大丰登、神农、孺子牛等国产大模型在技术上取得突破,推出了具备更接近人类“联想”推理能力的人工智能。这种通过自我思考获得原创性新知识的过程,称之为‘会学习决策’,通过‘会学习决策’得到的新知识仍要不断通过与环境的交互进行验证和自我评价,如果验证新知识是正确的,就把其作为正确经验进行自我更新,这也是强化学习的体现。”
是“跌倒爬起来”的“小强”也是未雨绸缪的“智多星”
具身智能“会学习决策”和“自成长控制”的特性在农业很多场景中有很多体现,陈建介绍,新一代具身智能育种机器人在对玉米、小麦、大豆等作物进行表型感知时,可以通过图像实时判断植株是否为潜在优势植株。通过深度学习技术从作物图像中解析到作物性状,训练育种机器人去学习各种性状对应的种质特性,像这样利用作物生长时的“样子”去强化学习,就是实现“会学习决策”。

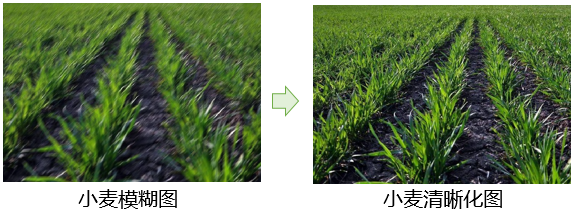
育种机器人只有走得稳、飞得稳,拍摄到的表型图像的质量才会高。而实际上,大田土壤不平坦、作物根茬残留,以及大风天恶劣的气流干扰、离作物过近的扰动,都会影响图像的正常使用,“我们从数学理论层面建立干扰观测器,让机器人未雨绸缪,学会预测控制、抵抗干扰,同步协调控制机器人的行进,一次调整不到位,就多次迭代学习控制,最终让机器人走得平稳、拍得平稳,这就是‘自成长控制’的生动体现。”
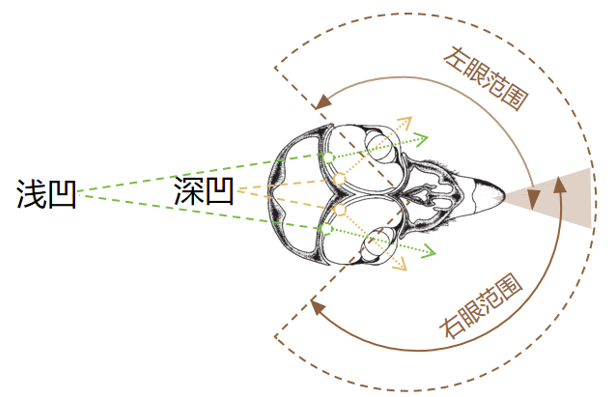
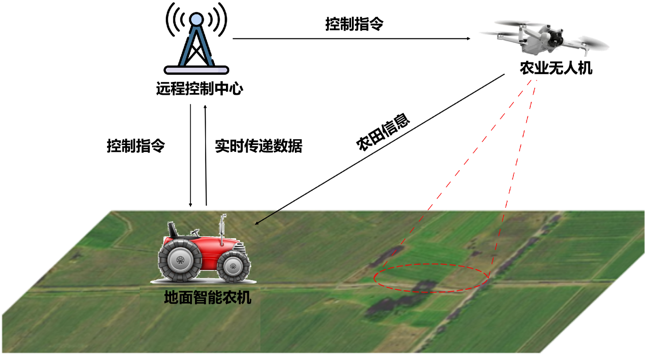
为了提升小麦、玉米、大豆智能化生产检测水平,装备层面,团队研发了针对作物全生育周期表型检测的具身智能育种机器人,包括多款地面育种机器人、空中育种无人机,全方位立体式感知作物表型;感知层面,团队让机器人搭载自主研发的仿鹰眼视觉表型相机,基于仿鹰眼相机与作物表型解析技术开展运行;决策层面,团队基于云边协同视觉大模型的作物表型组学决策技术判断优势植株,研究比“仿生”更进一步的“类生”技术来解决机器人在密植环境中的避障问题;控制层面,团队则大力研究图像防抖抗扰容错技术。


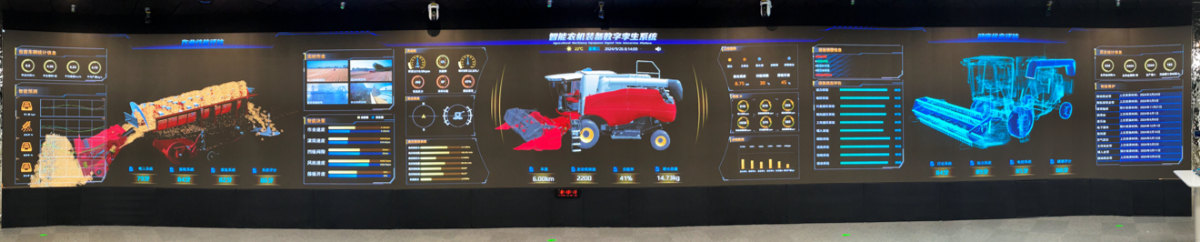
此外,团队还拥有智慧农业及智能装备数字孪生运维管控平台,整个系统位于工学院的全景教室,以数字孪生为载体,融合具身智能算法,提供智能装备运维管控服务,可以全面掌握人-机-物-环状态,实现智慧农业综合运维管控,及时有效反馈农业生产真实需求,指导装备先进智造。同时,团队还建立了农业机器人具身智能设计系统,以及农业机器人数字孪生试验平台。
创建“人工智能+教学+科研”新名片
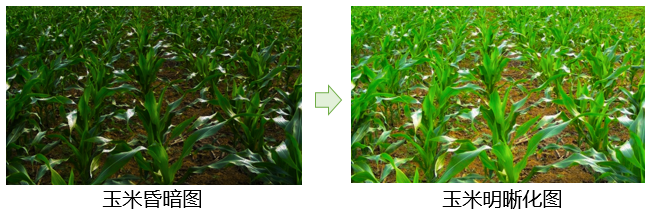
“研发具身智能机器人这样一款AI,最难攻克的就是自主研发的仿鹰眼视觉表型相机与表型图像防抖抗扰控制系统”,陈建表示,前者是在出现环境光不均、运动模糊后,对作物表型图像进行补偿处理;后者是在图像出现抖动、模糊等问题前就开展预判,提前调整机器人的行为来适应地形及外界环境干扰。
两者相互配合,才能达到最好的采集目的。目前两者配合将表型图像的有效采集率提升至92%,但距离想达到的95%以上还有不小距离,“这需要在包括鹰眼双中央凹大视场成像机制、鹰眼瞬膜/视杆细胞高质量成像机制、鹰眼视觉神经中枢防抖机制、鹰眼视觉自适应光适应机制、鹰眼视觉光流精准测距机制等仿生机制方面继续突破,也需要在图像防抖抗扰容错控制方面持续攻坚克难。”
在线实时决策方面,目前陈建团队搭建的云边协同视觉大模型范式解决了边缘端算力不足、云端算力响应延迟的问题,“18位权威育种学家从56种关键性状中选取了23种,我们利用深度学习优化模型解析了11种(如株数、果穗数、穗行数、籽粒形状、抗虫性等),还有12种需要解析,这方面除了要继续优化解析性状的深度学习模型以外,还需要从源头仿生机制上继续加强仿鹰眼相机深度测距技术研究,获取更精准信息。”
2024年,陈建团队在河北鸡泽县建立了具身智能机器人教授工作站,同时正在建设具身智能机器人科技小院,主要研究包括仿鹰眼视觉表型感知技术、“类生”行为决策与控制一体化设计技术、抗扰容错控制方法等。建站以来,团队研发了多款具身智能机器人及自主产权的核心部件,陈建也入选中国人工智能学会首届具身智能专委会委员、中国具身智能白皮书起草人,并以“新一代具身智能育种机器人”成果获第五届中国机器人行业年会LeadeRobot2024年度机器人应用创新奖、中国智能汽车学术年会优秀技术创新成果等奖项,指导学生获得第十四届“挑战杯”中国大学生创业计划竞赛“一带一路”国际邀请赛铜奖、中国研究生乡村振兴科技强农+创新大赛第四届科技作品竞赛一等奖。

随着全球对可持续农业发展的高度关注,陈建团队将继续在学校AI for Agriculture、AI for Science的谋划布局下,坚持学科交叉,开创工程科学与生命科学、基础科学深度融合拓新。“面向国家对于智能农机装备、智慧育种的重大需求,我们将从脑认知科学的角度研究包括育种机器人在内的农业无人系统具身智能技术,不仅要落地硬核的装备和自主产权关键部件,还要促进产学研协同攻关,将具身智能机器人技术落地于农业全产业链条,同时将教学育人、卓越工程师人才培养、科研、产业融为一体,进行试点改革,努力将具身智能机器人建设成为中国农大‘人工智能+教学+科研’的一张新名片。”
记者:学生记者 李心怡 董梦瑶
编辑:姜萍萍
责编:武慧媛


